electrical engineering
Mohammad Shahri Farimanielectrical engineering
Mohammad Shahri Farimaniفیلم آموزشی نحوه برنامه نویسی یک پروژه صنعتی ( تخلیه مخزن )
فیلم آموزشی برنامه نویسی نرم افزار Simatic Manager به زبان LAD ( پروژه کنترل و تخلیه مخازن ) :
سروو موتور Servo Motor - معرفی انواع سروو موتورها ، کاربرد سروو موتورها به همراه فیلمهای آموزشی
سروو موتور ( Servo Motor ) :
سروو موتور (Servo Motor) یا موتور فرمانیار موتوری است که معمولاً در سیستمهای حلقهبسته کنترل موقعیت، سرعت و گشتاور در کاربردهای صنعتی مورد استفاده قرار میگیرد ، در این آموزش با سروو موتور و ویژگیها و عملکرد آن آشنا میشویم.
فیلم آموزشی Servo Motor :
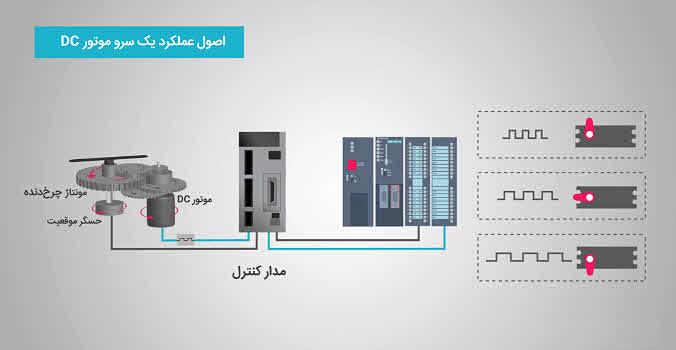
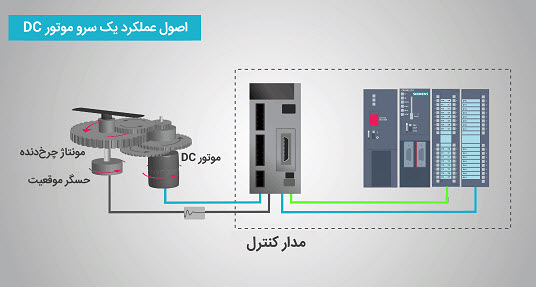
اصول کار سروو موتور
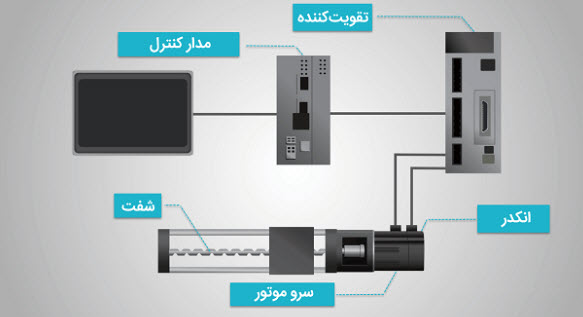
همانطور که گفتیم، سروو موتورها بخشی از یک سیستم حلقهبسته شامل مدار کنترل ، سروو موتور، شفت ، پتانسیومتر ، چرخدنده ، تقویتکننده و حتی انکدر یا تفکیککننده (Resolver) هستند.
سروو موتور یک قطعه الکتریکی مجزا و مستقل و ماشینی چرخان با بازده و دقت بالا است. شفت خروجی این موتور قابلیت جابهجایی به زوایه، موقعیت و سرعت خاصی را دارد که یک موتور عادی قادر به انجام آن نیست. سروو موتور از یک موتور عادی تشکیل شده که با یک سنسور برای فیدبک موقعیت کوپل شده است.
توجه : کنترلکننده مهمترین بخش سروموتور است که برای اهداف مشخصی طراحی میشود.
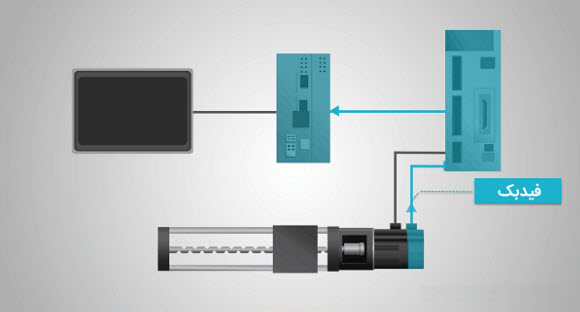
سروموتور یک ساز و کار حلقهبسته شامل یک فیدبک موقعیت برای کنترل سرعت و موقعیت چرخشی یا خطی است.
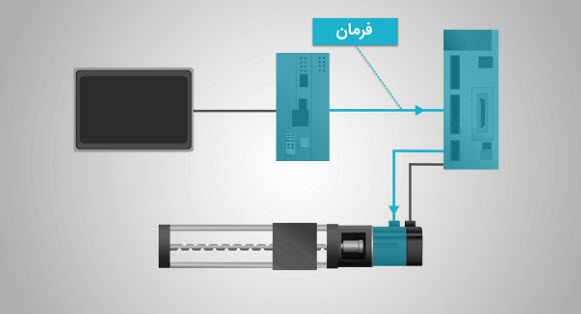
موتور با یک سیگنال الکتریکی (آنالوگ یا دیجیتال) کنترل میشود که مقدار جابهجایی را تعیین میکند و نشان دهنده موقعیت فرمان نهایی شفت است.
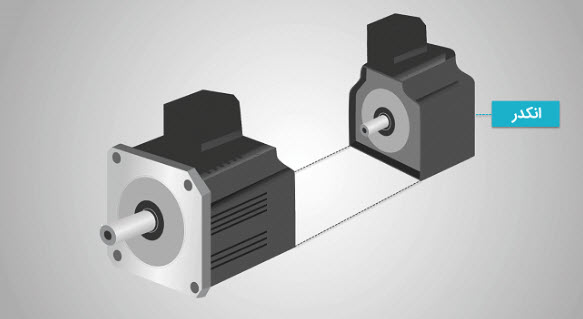
نوعی انکدر که به عنوان سنسور مورد استفاده قرار میگیرد، فیدبک سرعت و موقعیت را مهیا میکند ، این مدار درون محفظه موتور تعبیه شده که معمولاً با سیستم جعبهدنده ادغام شده است.
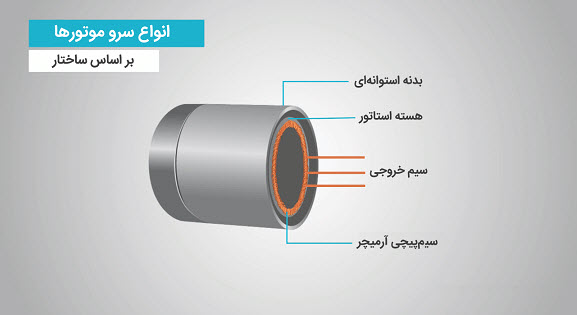
انواع سروو موتورها
سروموتورها را میتوان بر اساس کاربردی که دارند، در دو دسته سروموتورهای AC و سروموتورهای DC دستهبندی کرد ، همچنین، سروموتورها را میتوان از سه جنبه مورد ارزیابی قرار داد:
1- بر اسال جریان کاری (AC یا DC)،
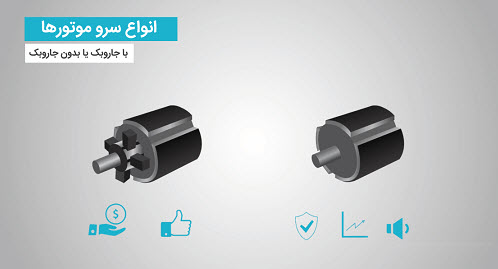
2- بر اساس نوع کموتاسیون (استفاده یا عدم استفاده از جاروبک)
3- چرخش روتور نسبت به میدان مغناطیسی گردان (سنکرون یا آسنکرون).
ابتدا درباره جنبه نخست بحث میکنیم. AC یا DC بودن یکی از معیارهای اساسی دستهبندی یک موتور بر اساس نوع جریانی است که آن را تغذیه میکند. از دیدگاه عملکرد، تفاوت اولیه بین موتورهای AC و DC در توانایی ذاتی کنترل سرعت است. در یک موتور DC، سرعت مستقیماً با منبع ولتاژ با بار ثابت ارتباط دارد و در موتور AC، سرعت به فرکانس ولتاژ اعمالی و تعداد قطبهای مغناطیسی وابسته است.
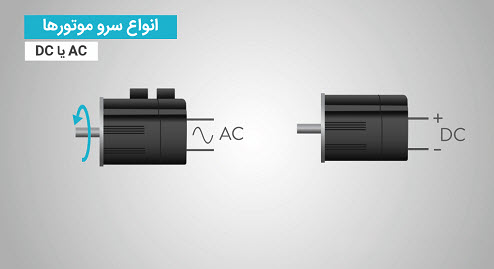
توجـــه : هر دو نوع موتورهای AC و DC در سیستمهای سروو مورد استفاده قرار میگیرند. علیرغم آنکه موتورهای AC جریان بیشتری مصرف میکنند، استفاده از آنها در کاربردهای سروو مانند رباتها، کارخانهها و سایر کاربردهای صنعتی رایجتر است که در آنها تکرار و دقت بالا مورد نیاز است.
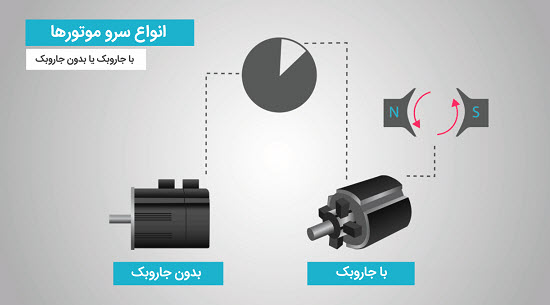
جنبه دیگر دستهبندی موتورها، وجود یا عدم وجود جاروبک در آنها است. یک سروو موتور DC به صورت مکانیکی و با استفاده از کموتاتور یا به صورت الکترونیکی بدون جاروبک عمل کموتاسیون را انجام میدهد. موتورهای دارای جاروبک معمولاً ارزانتر هستند و عملکرد آنها سادهتر است؛ در حالی که موتورهای بدون جاروبک قابل اعتمادتر هستند و بازده بیشتر و نویز کمتری دارند.
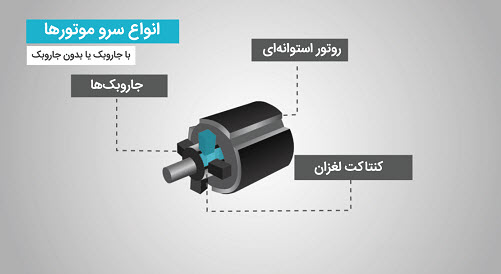
کموتاتور :
کموتاتور یک سوئیچ یا کلید الکتریکی چرخان است که به صورت متناوب جهت جریان بین روتور و مدار درایو (راهانداز) را تغییر میدهد.
کموتاتور از یک حلقه استوانهای متشکل از چند بخش کنتاکت فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی که «جاروبک» نام دارند ، از یک ماده هادی مانند کربن ساخته شده و در مقابل کموتاتور تعبیه میشوند. هنگام چرخش روتور، جاروبکها با بخشهای رسانای کموتاتور تماس لغزشی خواهند داشت.
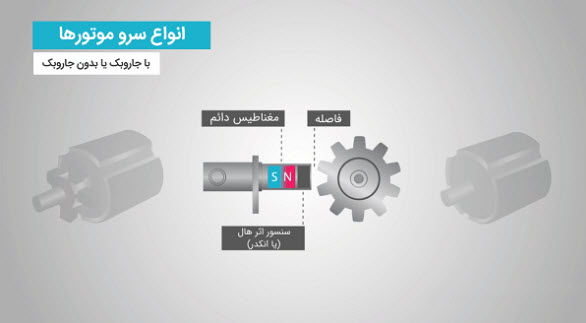
در حالی که اغلب موتورهای مورد استفاده در سیستمهای سروو موتورهای AC بدون جاروبک هستند ، موتورهای مغناطیس دائم با جاروبک نیز به دلیل سادگی و هزینه پایینی که دارند، مورد استفاده قرار میگیرند. همچنین، رایجترین نوع موتورهای DC با جاروبک که در کاربردهای سروو مورد استفاده قرار میگیرند، موتورهای DC ، مغناطیس دائم هستند.
توجــه : در موتورهای DC بدون جاروبک، جاروبکهای فیزیکی و کموتاتور با یک معادل الکترونیکی که معمولاً از سنسور اثر هال یا یک انکدر تشکیل شده است ، جایگزین میشود.
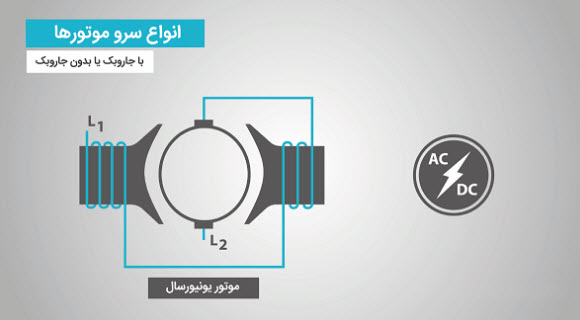
توجــه : موتورهای AC معمولاً بدون جاروبک هستند، هرچند در برخی مدلها، مانند موتور یونیورسال ، که میتواند با هر دو توان AC و DC کار کند، جاروبک وجود دارد و عمل کموتاسیون به صورت مکانیکی انجام میشود.
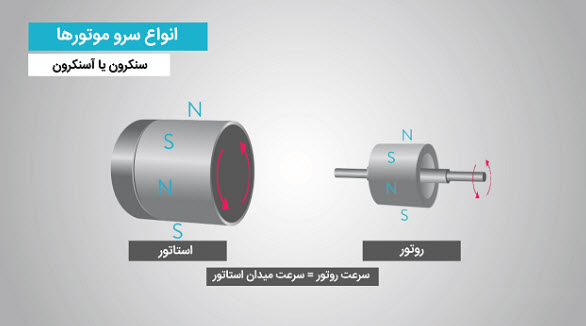
سومین و آخرین جنبه برای دستهبندی سروو موتورها، این است که روتور آنها با سرعت سنکرون حرکت میکند یا آسنکرون. در حالی که موتورهای DC اغلب در دو دسته با جاروبک و بدون جاروبک دستهبندی میشوند، دستهبندی موتورهای AC اغلب بر اساس سرعتشان نسبت به میدان مغناطیسی گردان تعیین میشود. همانطور که گفتیم، در موتورهای AC ، سرعت با فرکانس منبع ولتاژ و تعداد قطبهای مغناطیسی تعیین میشود، این سرعت به سرعت سنکرون معروف است.
نکته : بنابراین، در یک موتور سنکرون ، روتور با سرعتی برابر با سرعت میدان مغناطیسی گردان میچرخد.
توجه : موتور آسنکرون ، موتور القایی نیز نامیده میشود و سرعت چرخش آن کمتر از سرعت چرخش میدان است ، البته سرعت یک موتور آسنکرون را میتوان با چند روش مختلف مانند تغییر تعدد قطبها و تغییر فرکانس منبع تغییر داد.
توجـــه : یک سروو موتور DC از چهار بخش اصلی تشکیل میشود: موتور DC، سنسور موقعیت، مجموعه چرخدنده و مدار کنترل. همانطور که گفتیم، سرعت مطلوب یک موتور DC با ولتاژ اعمالی به آن متناسب است.
برای کنترل سرعت موتور، یک پتانسیومتر، ولتاژی را تولید میکند که به عنوان یکی از ورودیها به تقویتکننده خطا وارد میشود.
در برخی مدارها، از یک پالس کنترل برای تولید ولتاژ مرجع متناظر با موقعیت یا سرعت مطلوب استفاده شده و به یک مبدل ولتاژ پهنای پالس اعمال میشود.
در کنترل دیجیتال، برای کنترل دقیق، یک PLC یا کنترلکننده حرکت دیگر برای تولید پالسها بر اساس سیکل وظیفه به کار میرود.
توجـــه : سنسور سیگنال فیدبک ، معمولاً یک پتانسیومتر است که ولتاژی را متناسب با زاویه مطلق شفت موتور در ساز و کار چرخدنده تولید میکند ، در نتیجه، مقدار ولتاژ فیدبک به ورودی تقویتکننده مقایسهکننده خطا وارد میشود ، تقویتکننده ولتاژ تولیدی موقعیت فعلی موتور ، یعنی فیدبک پتانسیومتر و موقعیت مطلوب موتور را مقایسه کرده و یک ولتاژ خطای مثبت یا منفی تولید میکند ، این ولتاژ خطا به آرمیچر موتور اعمال میشود ، وقتی خطا زیاد شود ، ولتاژ خروجی به آرمیچر موتور اعمال میشود. موتور تا زمانی که خطا به صفر برسد میچرخد ، اگر خطا منفی باشد ، ولتاژ آرمیچر معکوس شده و در نتیجه آرمیچر در جهت عکس میچرخد.
اصول عملکرد سروو موتورهای AC بر اساس ساختار دو نوع سروو موتور آسنکرون و سنکرون است ، سروموتور AC سنکرون از استاتور و روتور تشکیل شده است ، استاتور شامل یک قاب و بدنه استوانهای و هسته استاتور است ، سیمپیچی آرمیچر به دور هسته استاتور پیچانده شده و به یک سیم متصل است که جریان موتور را تأمین میکند.
توجـــه : روتور از یک مغناطیس دائم تشکیل شده و نسبت به روتور نوع آسنکرون القایی که جریان روتور آن با الکترومغناطیس القا میشود متفاوت است ، به همین دلیل ، این نوع موتورها ، سروو موتورهای بدون جاروبک نامیده میشوند.
هنگامی که میدان استاتور با ولتاژ تحریک شود ، روتور میدان مغناطیسی گردان استاتور را با سرعت مشابه یا سنکرون با میدان تحریکی استاتور دنبال میکند و این همان لحظهای است که با موتور نوع سنکرون مواجه خواهیم بود.
در روتور مغناطیس دائم ، وقتی میدان استاتور بدون انرژی شده و متوقف میشود ، به جریان نیازی نیست.
این موتورها به دلیل نداشتن جریان روتور بازده بالاتری دارند ، وقتی موقعیت روتور نسبت به استاتور مورد نظر باشد ، یک انکدر روی روتور قرار داده میشود که فیدبک به کنترلکننده سروو موتور را مهیا میکند.
استاتور سروو موتور AC آسنکرون یا القایی از هسته استاتور ، سیمپچی آرمیچر و سیم خروجی تشکیل شده است ، اجزای روتور نیز شفت و سیمپیچی هسته آن هستند.

منبع AC فقط سیمپیچی استاتور را تغذیه میکند و سبب تولید میدان شار متناوب در اطراف سیمپیچی استاتور میشود.
این میدان متناوب با سرعت سنکرون میچرخد و میدان مغناطیسی گردان (RMF) نام دارد. طبق قانون القای الکترومغناطیس فارادی ، سرعت نسبی بین روتور و میدان چرخان استاتور سبب ایجاد نیروی الکترومغناطیسی در هادیهای روتور میشود.

اکنون، جریان القایی روتور یک میدان شار متناوب در اطرافش تولید خواهد کرد.شار روتور از شار استاتور عقبتر است. روتور در جهت میدان دوار استاتور میچرخد و نمیتواند به سرعت میدان استاتور برسد و و به عبارتی، سنکرون شود. در نتیجه، آسنکرون خواهد بود.
کاربردهای سروو موتور
سروو موتورها در سیستمهای صنعتی و تجاری کاربردهای فراوانی دارند ، برای مثال، در مفاصل رباتهای صنعتی به کار میروند و زاویه حرکت دقیق را مهیا میکنند.
برای فوکوس خودکار دوربینها ، یک سروو درون دوربین تعبیه شده و موقعیت لنز را برای واضح کردن تصاویر به صورت دقیق تصحیح میکند.
در سیستمهای مکانیابی، از سروو موتورها برای موقعیتیابی محور سمت و بلندی آنتنها و تلسکوپها استفاده میشود.
فیلم آموزشی کوتاه Servo Motor :
فیلم آموزشی کوتاه عملکرد Servo Motor :
فیلم آموزشی کنترل یک پروژه صنعتی ( خط پُرکن اتومات ) Automatic Filling System
فیلم آموزشی کنترل خط پُرکن اتومات
فیلم آموزشی برنامه نویسی کنترل یک پروژه صنعتی ( پُرکردن مخزن ، میکسر و خالی کردن مخزن ) با نرم افزار Simatic Manager
فیلم آموزشی : پُر شدن یک مخزن از یک مایع ، انجام عمل میکسر و هم زدن مایع و سپس تخلیه مخزن به طور اتوماتیک و برنامه نویسی با نرم افزار Simatic Manager و استفاده از نرم افزار Simatic WinCC جهت طراحی سیستم HMI
محیط برنامه نویسی گراف ( S7 - Graph ) در Simatic Manager به همراه فیلم آموزشی
محیط S7 - Graph و زبان برنامه نویسی گراف با ایجاد فانکشن بلاک FB :
تفاوت ایجاد محیط برنامه نویسی گراف با ایجاد Function Block با روش Sources File در این است که در روش ایجاد با فانکشن بلاک ( FB ) ، چون Save & Compile می شود اگر Error داشته باشد ، ذخیره نمی شود، اما در روش Sources می توانید با وجود داشتن Error ، برنامه را ذخیره کنید و بعد از روی فرصت خطاهای ایجاد شده را برطرف نمایید.
ایجاد محیط S7 - Graph با روش ایجاد فانکشن بلاک ( FB ) :
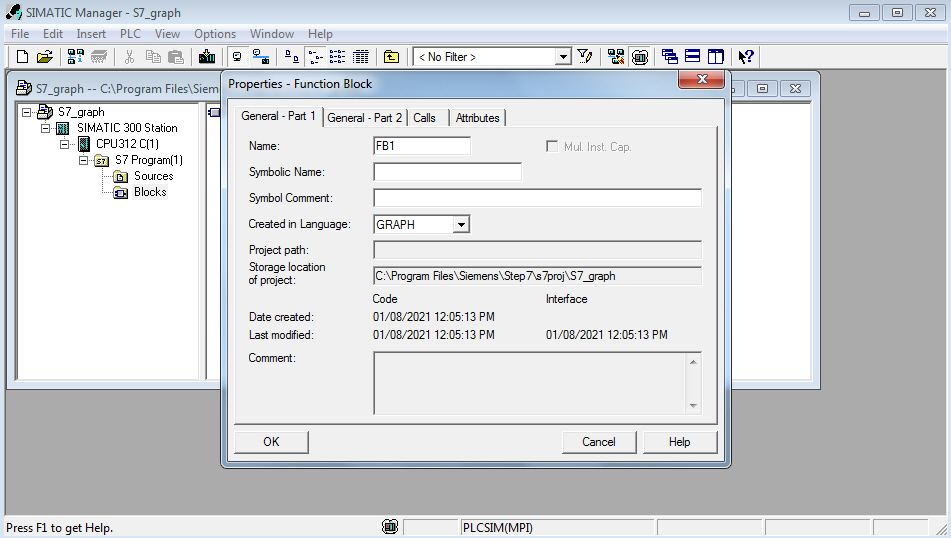
آشنایی با محیط نرم افزار S7 - Graph :
پس از اجرای برنامه S7 - Graph ، پنجره برنامه به شکلی شبیه زیر ظاهر می شود ، برای توصیف بهتر بخش های این برنامه ، شماره گذاری شده اند ، برنامه در بخش شماره 2 ، ترسیم می شود :
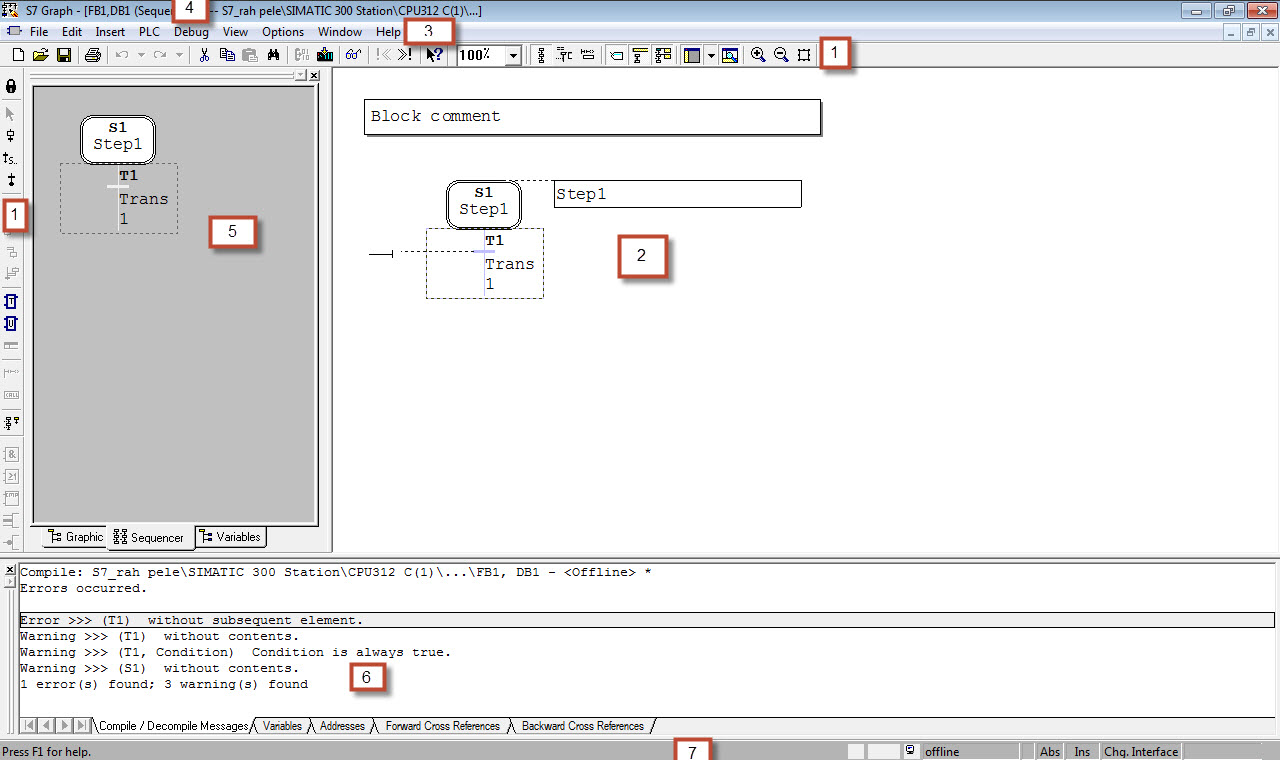
بخش 1 : این بخش که در بالا و نیز سمت چپ ظاهر می شود ، همان نوار ابزار ( Toolbars ) برنامه است ، بخش بالا به دوقسمت Standard و View تقسیم می شود که در فیلم آموزشی توضیح داده شده است.
بخش 1 در سمت چپ نیز به دو قسمت Sequencer و LAD/FBD تقسیم می شود که این قسمت هم در فیلم آموزشی توضیح داده شده است .
بخش 2 : برنامه کنترل ترتیبی در این بخش ترسیم و نوشته می شود ، وقتی برای اولین مرتبه ، برنامه Graph را باز می کنیم ، معمولاً شامل یک مستطیل به نام Step 1 که با S1 نشان داده می شود و یک خط افقی در زیر آن به نام Transition 1 که با T1 نشان داده می شود ، می باشد .
بخش 3 : این بخش Menu Bar برنامه است.
بخش 4 : این بخش Title Bar برنامه است ، نام پروژه ، شماره FB و DB و اطلاعاتی از این قبیل در این بخش نشان داده می شود .
بخش 5 : به این پنجره Overview گفته می شود ، و در آن می توان وضعیت کل Stepها که تشکیل یک Sequencer یا توالی را می دهند ، مشاهده کرد .
بخش 6 : به این پنجره Detail گفته می شود که در پایین برنامه ظاهر می شود و در آن می توان وضعیت متغیرها یا آدرس های استفاده شده را دید و در هنگام ذخیره سازی برنامه ، لیست Errorها و Warningها را در این بخش قابل مشاهده است .
بخش 7 : به این قسمت Status Bar گفته می شود ، وضعیت CPU در حالت Online در این قسمت قابل مشاهده است .
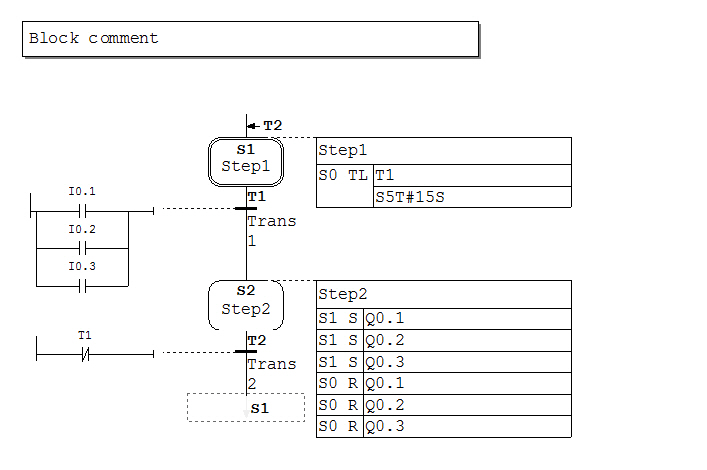
Step و Transition : در محیط اصلی S7 - Graph ، شکل یک Step و یک Transition نمایش داده می شود .
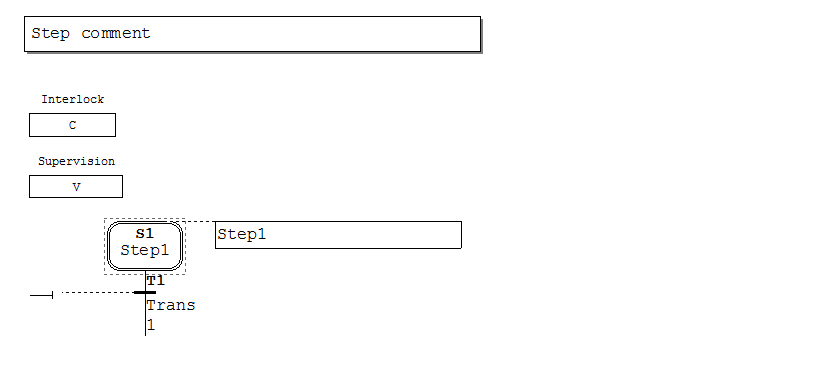
مفهوم Step که به صورت یک باکس مستطیل شکل نمایش داده می شود ، مرحله ای است که PLC به آن وارد می شود و در آنجا دستور یا دستورات خاصی را اجرا می کند ، CPU آنقدر در این مرحله می ماند تا شرایط گذر یا Transition که در زیر Step با یک خط افقی نمایش داده شده ، برآورده شود .
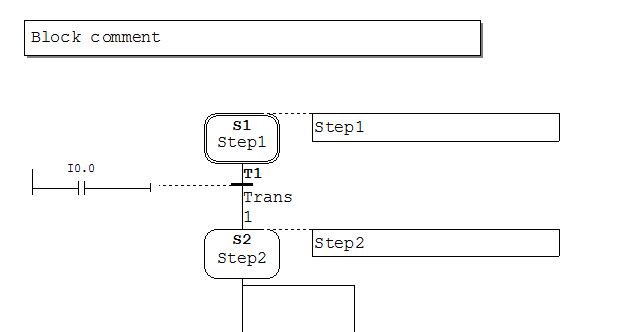
به عنوان مثال در شکل زیر درصورتی CPU از مرحله 1 عبور کرده و وارد مرحله2 می شود که سوئیچ I0.0 بسته شود :
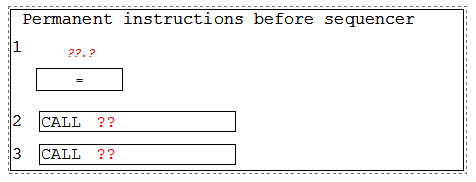
دستورات دائمی ( Permanent Instruction ) : دستوراتی هستند که در هر سیکل اسکن ، صرفنظر از اینکه برنامه در کدام Step قرار دارد ، یکبار اجرا می شوند ، دستورات بخش Permanent بالای بلاک ، در ابتدای سیکل اسکن و دستورات Permanent پایین بلاک ، در انتهای سیکل اسکن اجرا می گردند ، دستورات می تواند از نوع condition یا از نوع Call باشد ، که ازمنوی Insert ، قسمت Permanent Instruction ، دستورات را می توان انتخاب کرد .
دستورات Permanent قبل از Sequencer :
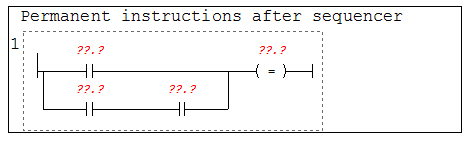
دستورات Permanent بعد از Sequencer :
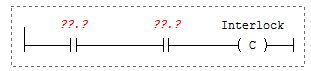
بخش Interlock : در این قسمت شرایط Interlock مربوط به Step نوشته می شود، از شرایط Interlock می توان برای دستورات برنامه نویسی Step استفاده کرد و متناسب با آن دستوراتی را اجرا کرد ، پس از این حیث با شرایط Transition متفاوت است چون Transition فقط شرایط گذر از Step را در برمی گیرد .
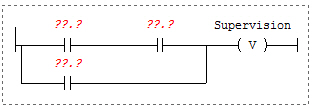
بخش Supervision : در این قسمت می توان یک Step را تحت نظارت قرار داد تا به عنوان مثال اگر زمان اجرای آن از حدی بیشتر شد یا کلید خاصی فعال شد ، آلارمی ظاهر شود .
بخش Comment : در این بخش ، توضیحات مربوط به همان Step را می توان نوشت و با بخش Block Comment که مربوط به توضیحات توالی ( Sequencer ) است ، متفاوت می باشد .

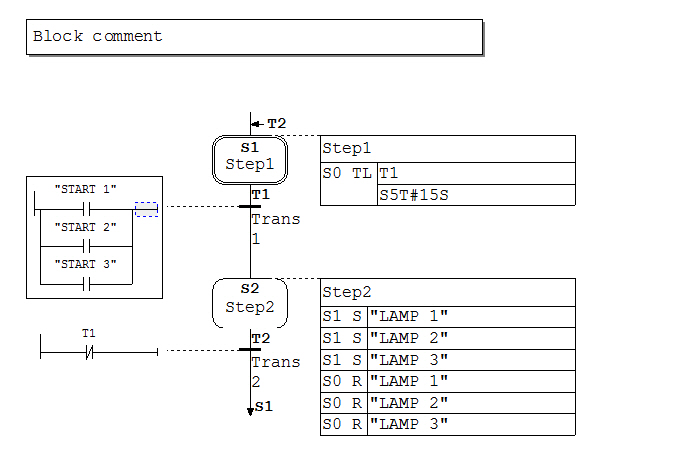
توجــه : می خواهیم برنامه کنترل روشنایی راه پله را که قبلاً به زبان FBD نوشته بودیم را به زبان گراف ، طراحی نماییم ، بهطوریکه سه عدد لامپ برای روشنایی که از نقطه مختلف کنترل شود ، برای کنترل از سه محل می توان از سه عدد شستی استارت یا سه عدد سنسور بدون تماس ( BERO ) خازنی ، استفاده کرد ، بعد از آنکه یکی از شستیهای استارت فشرده شود یا یکی از سنسورها ، حضور فردی را حس کند و اکتیو شود ، لامپها روشن شوند و به مدت 15 ثانیه روشن بمانند، درصورتیکه یکی از شستی استارت ، از یکی از محلهای کنترل ، مجدد فشرده شود و یا یکی از سنسورها ، دوباره فعال گردد ، دراینصورت مجدد زمان 15 ثانیه شروع شود و لامپ ها روشن شوند .
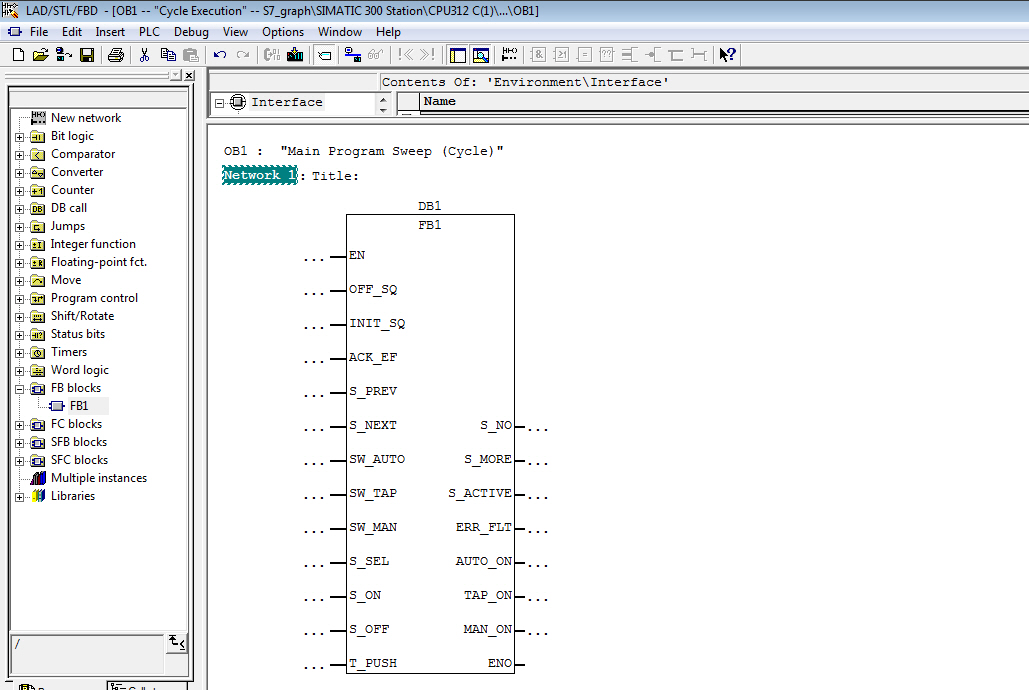
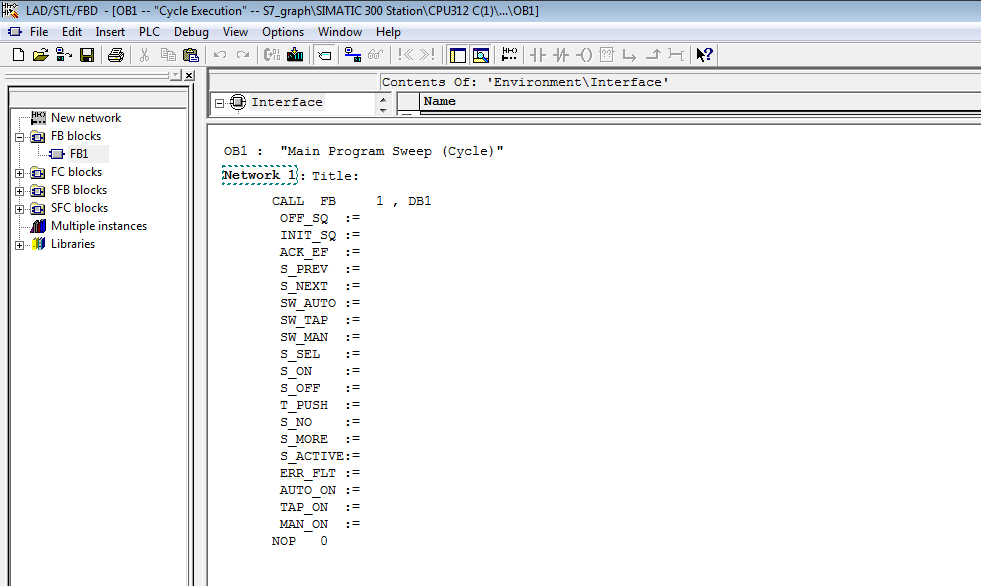
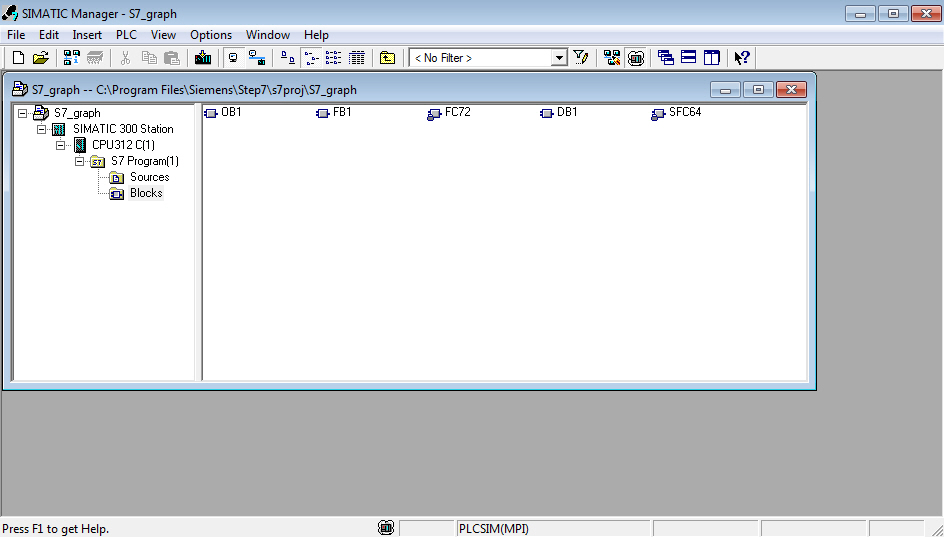
فیلم آموزشی ایجاد فانکشن بلاک ( FB1 ) و برنامه نویسی به زبان گراف در S7 - Graph ، فراخوانی فانکشن بلاک FB1 در بلاک OB1 ، دانلود برنامه و تست برنامه در شبیه ساز(Simulation ) :