electrical engineering
Mohammad Shahri Farimanielectrical engineering
Mohammad Shahri Farimaniسیستمهای کنترل و PID کنترلر به همراه فیلم آموزشی
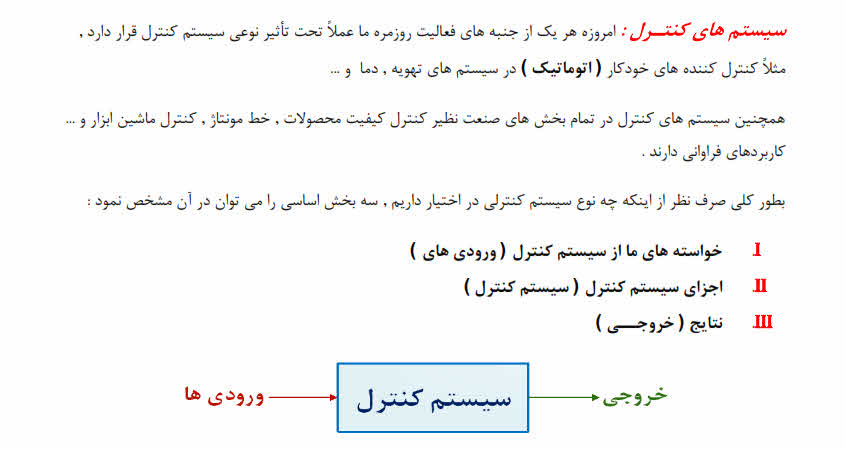
سیستمهای کنترل :
PID Controller:
از رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC ، کنترل فشار، کنترل دما و… کاربرد دارد. کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند ، هدف کنترلکننده ، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است.
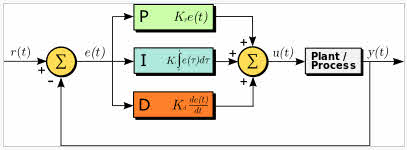
PID از سه قسمت مجزا به نامهای Proportional (تناسبی) ، Integral (انتگرالگیر) و Derivative (مشتقگیر) تشکیل شده که هر کدام از آنها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام میدهند و در نهایت خروجی شان با هم جمع میشود ، خروجی این مجموعه که همان خروجی کنترلکننده PID است برای اصلاح خطا (error) به سیستم فرستاده میشود.
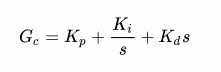
توجــــه : فرمول استاندارد PID به فرم زیر است:

بنابراین تابع تبدیل یک کنترلکننده PID به صورت زیر درمیآید:
بلوک دیاگرام یک PID کنترلر :
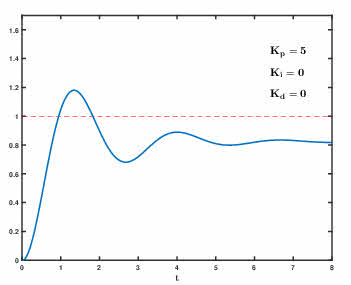
اثر تغییر پارامترهای مختلف یک کنترلکننده PID ایدهآل روی پاسخ پله یک سیستم خطی :
1- جمله تناسبی ( ضریب Kp ) ، سرعت سیستم را افزایش میدهد و خطای حالت دائم را تا حدودی کاهش میدهد (اما صفر نمیکند).
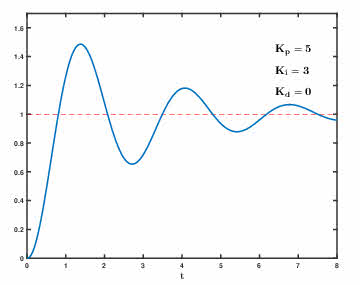
2- افزودن جمله انتگرالگیر ( ضریب Ki ) خطای حالت دائم را صفر میکند، اما مقدار زیادی نوسانات ناخواسته (overshoot) به پاسخ گذرا اضافه مینماید.
3- جمله مشتقگیر ( ضریب Kd ) نوسانات پاسخ گذرا را تضعیف کرده و پاسخ پله را به شکل پله ایدهآل نزدیک مینماید.
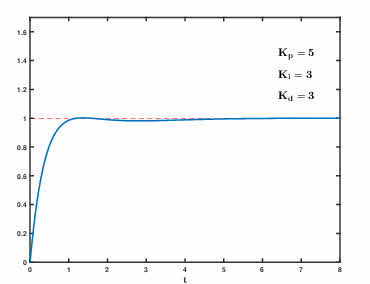
افزودن پارامترهای تناسبی ( Kp ) - انتگرالگیر ( Ki ) - مشتقگیر ( Kd ) :
فیلم آموزشی نحوه استفاده از PID کنترلر در محیط نرم افزار Simatic Manager :


























