electrical engineering
Mohammad Shahri Farimanielectrical engineering
Mohammad Shahri FarimaniSimatic Manager , Flip Flop SR - فیلم آموزشی راهاندازی الکتروموتور به صورت دائمکار با استفاده از فلیپ فلاپ SR
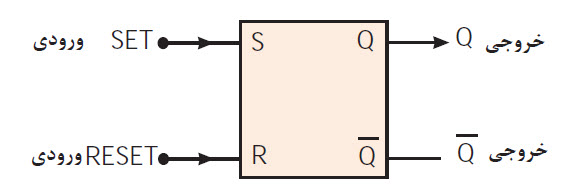
فلیپ فلاپ SR : مدارهای ترتیبی هستند که دو وضعیت پایدار SET و RESET دارند ، سلولهای حافظه سادهترین مدارهای ترتیبی هستند که این سلولها را فلیپ فلاپ ( Flip Flop ) می گویند .
در این مدار R ،حرف اول کلمه Reset به معنی بازگرداندن به حالت اولیه و S حرف اول کلمه Set به معنی ایجاد حالت مورد نظر است .
یک سلول حافظه باید قابلیت حفظ اطلاعات ثبت شده ( به خاطر سپاری ، به یاد سپاری ، نگهداری ) را داشته باشد ، به عبارت دیگر یک سلول حافظه باید دارای قابلیتهای زیر باشد :
* پذیرش اطلاعات در هر زمان
* حفظ اطلاعات پذیرفته شده تا هر زمان
* جایگزینی اطلاعات جدید به جای اطلاعات قبلی در هر زمان

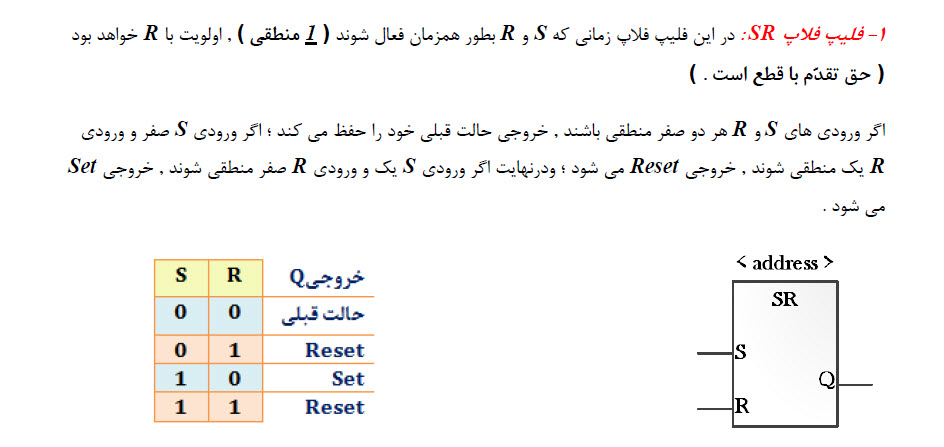
بلوک دیاگرام فلیپ فلاپ SR
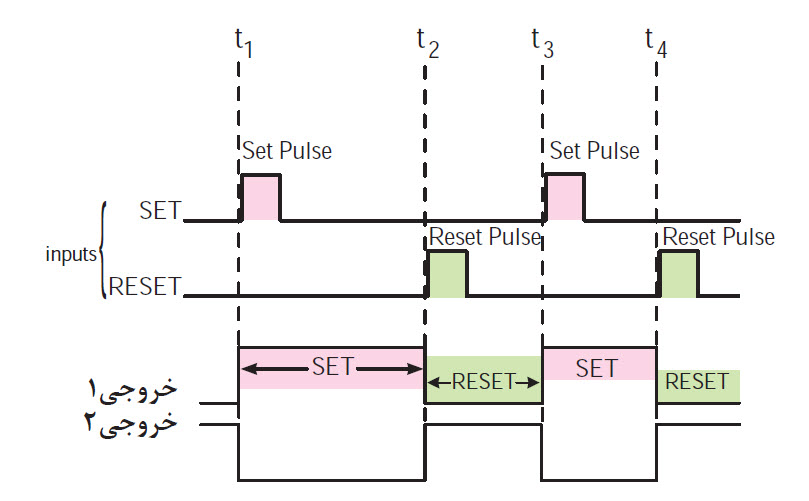
دیاگرام فلیپ فلاپ SR
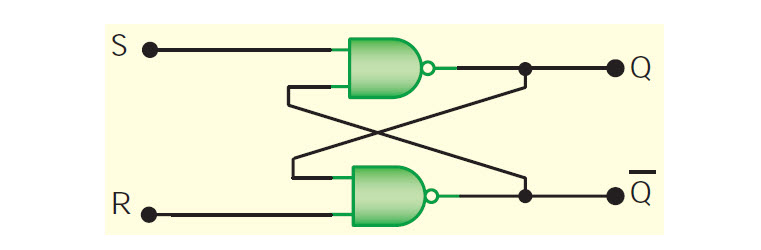
مدار داخلی فلیپ فلاپ SR با استفاده از گیت NAND
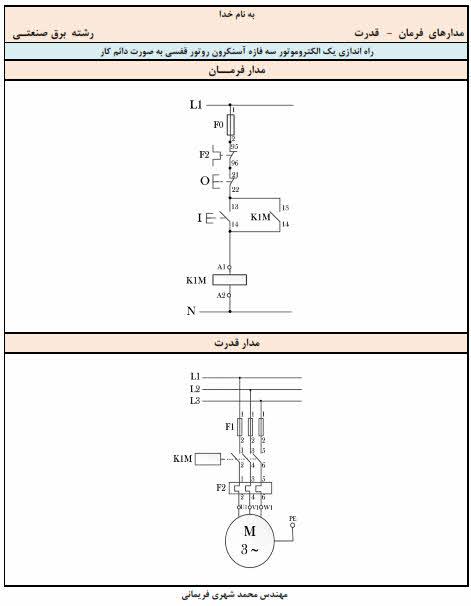
توجه : اگر به مدار فرمان راهاندازی یک الکتروموتورسه فازه به صورت دائمکار دقت نمایید ، شستی استارت را که فشرده میکنیم ، فاز به یک سر بوبین کنتاکتور ( A1 ) می رسد ، سر دیگر بوبین کنتاکتور ( A2 ) را نیز از قبلً ، نول دادهایم ، درنتیجه کنتاکتور فعال میشود و تیغههای باز آن بسته میشوند ، تیغه نگهدارنده که با شستی استارت موازی شده است نیز بسته میشود و حال اگر دستمان را از روی شستی استارت برداریم ، کنتاکتور قطع نمیشود ، چون فاز از طریق تیغه نگهدارنده به بوبین کنتاکتور میرسد و همچنین تیغههای قدرت نیز بسته شده و سه فاز به سر کلافهای الکتروموتور میرسد و بسته به نوع اتصال و نوع موتور ، به صورت ستاره یا مثلث ، موتور روشن میشود و تا زمانی که شستی استپ فشرده نشود ، کنتاکتور وصل بوده و الکتروموتور روشن خواهد بود ، مدار راهاندازی الکتروموتور به صورت دائمکار را قبلاً به زبان برنامه نویسی LADDER نوشتهایم تا شباهت آن را با مدار فرمان کنتاکتوری مقایسه کنید ، اما در فیلم زیر مشاهده خواهید کرد که به آسانی به وسیله فلیپ فلاپ SR ، میتوان مدار راهاندازی الکتروموتور به صورت دائمکار را طراحی کرد .
مدارفرمان و قدرت کنتاکتوری راهاندازی الکتروموتور سهفازه به صورت دائمکار :
فیلم آموزش راه اندازی الکتروموتور به صورت دائمکار به زبان برنامهنویسی FBD در محیط نرمافزار Simatic Manager با استفاده از فلیپ فلاپ SR :
Simatic Manager , IM Module - فیلم آموزشی کوتاه ماژول IM
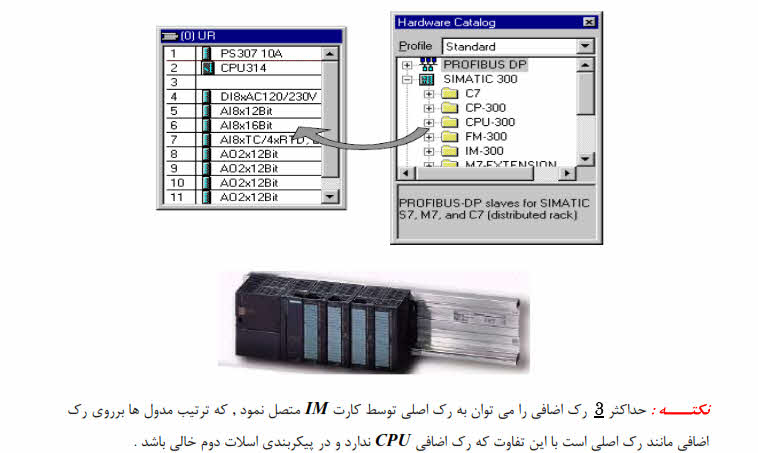
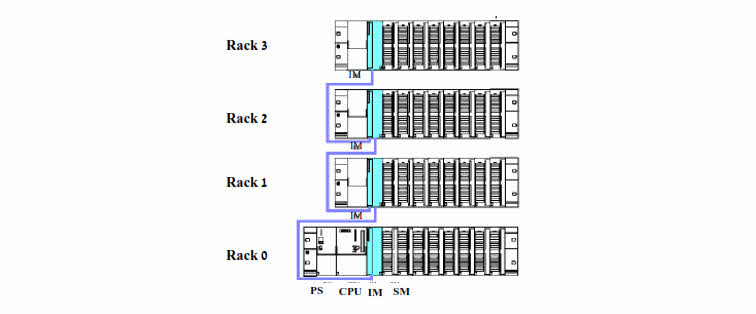
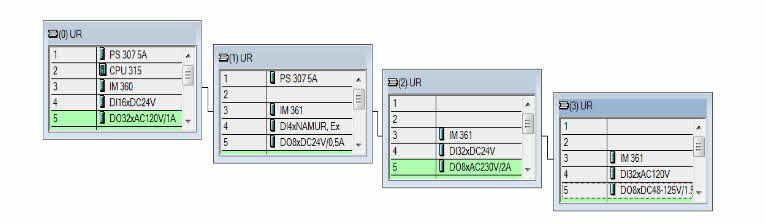
توجه : ماژول IM ، برای ارتباط چند Rack با یکدیگر و افزایش تعداد رَکها ، استفاده می شود ، این ماژول در اسلات شماره 3 قرار می گیرد .
فیلم آموزشی کوتاه IM Module :
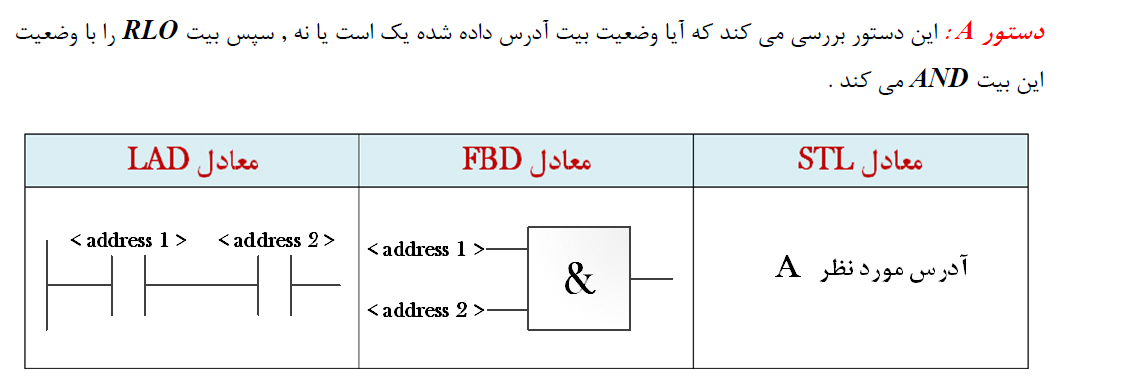
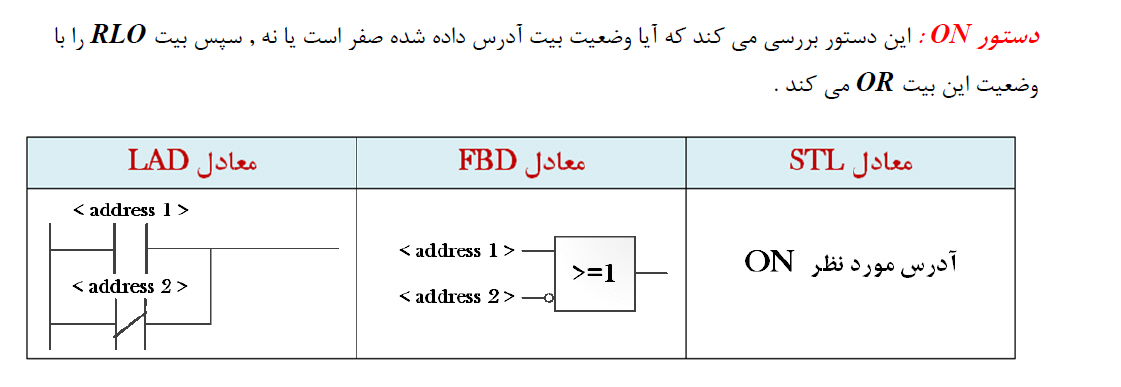
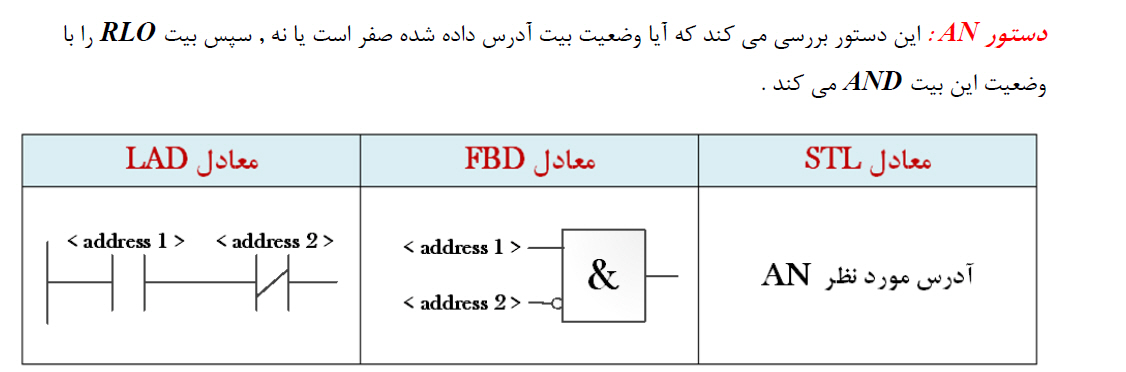
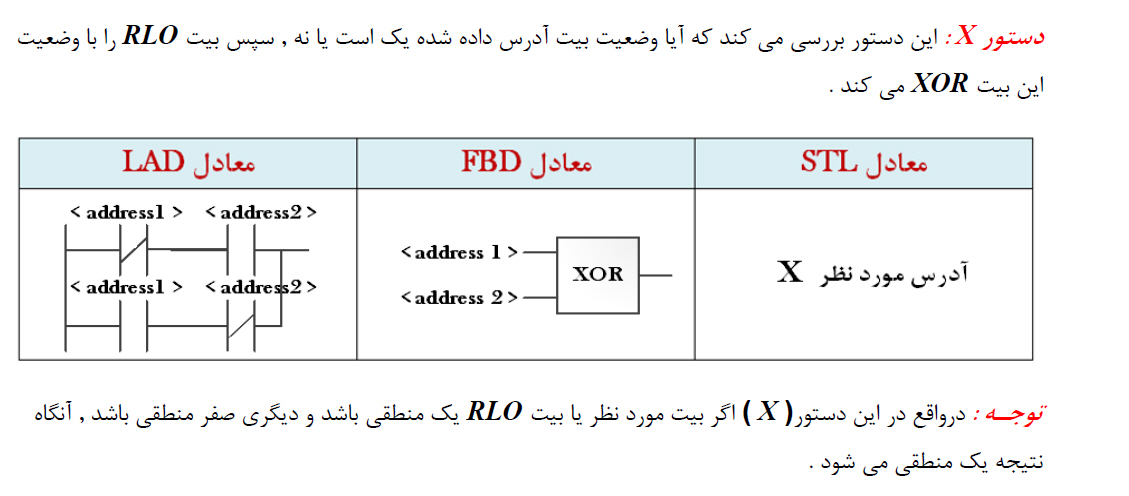
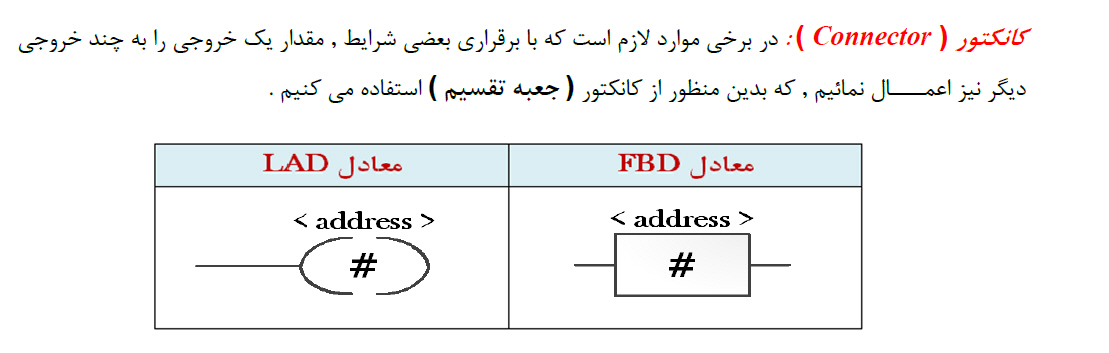
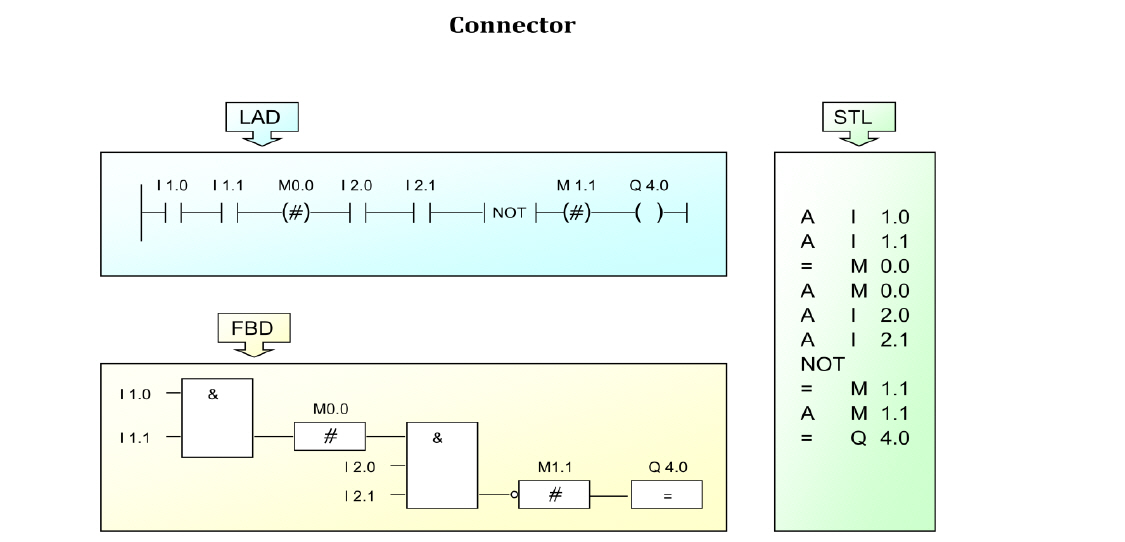
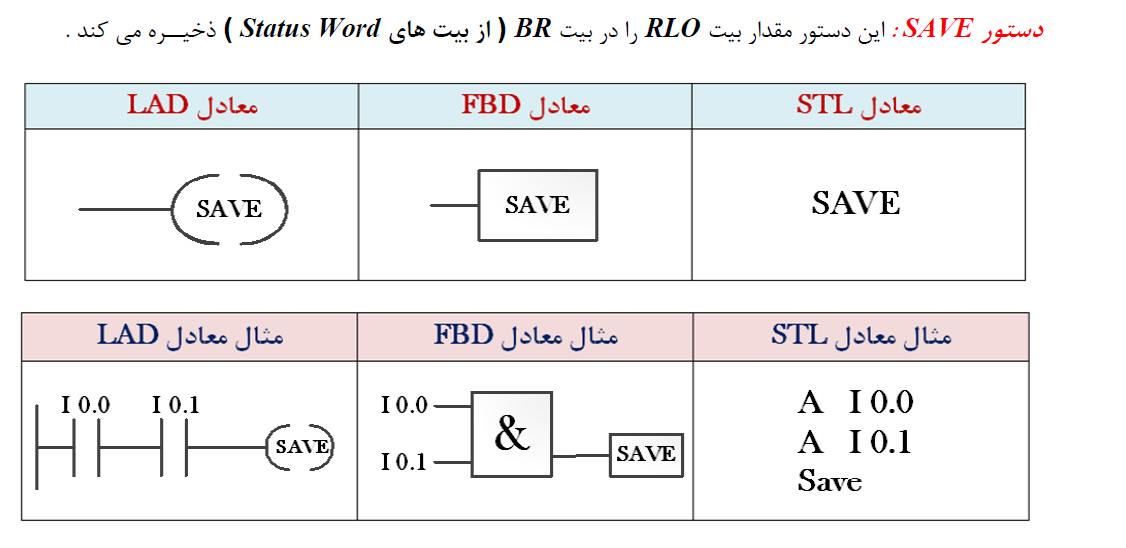
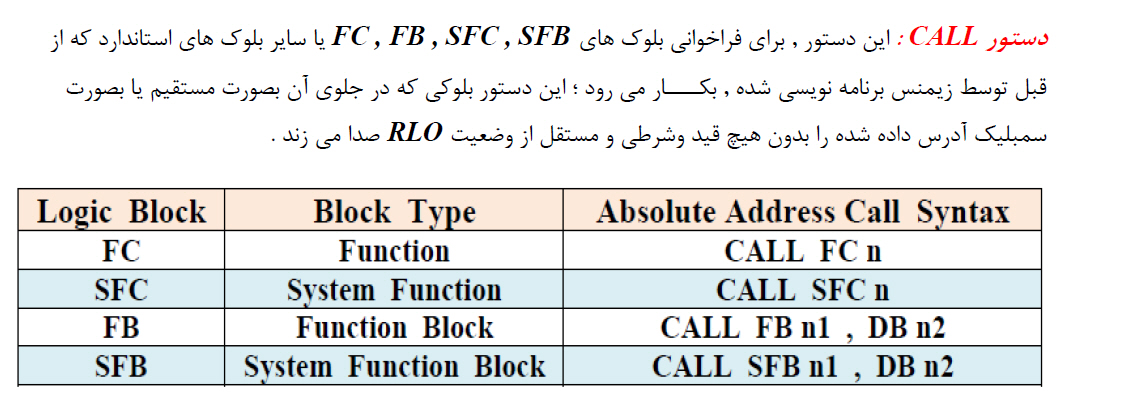
مطالبی راجع به نرم افـــــزار Simatic Manager - دستورات Bit Logic - فیلم آموزشی کوتاه زبانهای برنامه نویسی LAD/STL/FBD
توجه : تمامی مطالب زیر ، برگرفته از فصل هفتم و هشتم ، کتاب کارور PLC ، نوشته مهندس محمد شهری فریمانی ، میباشد .
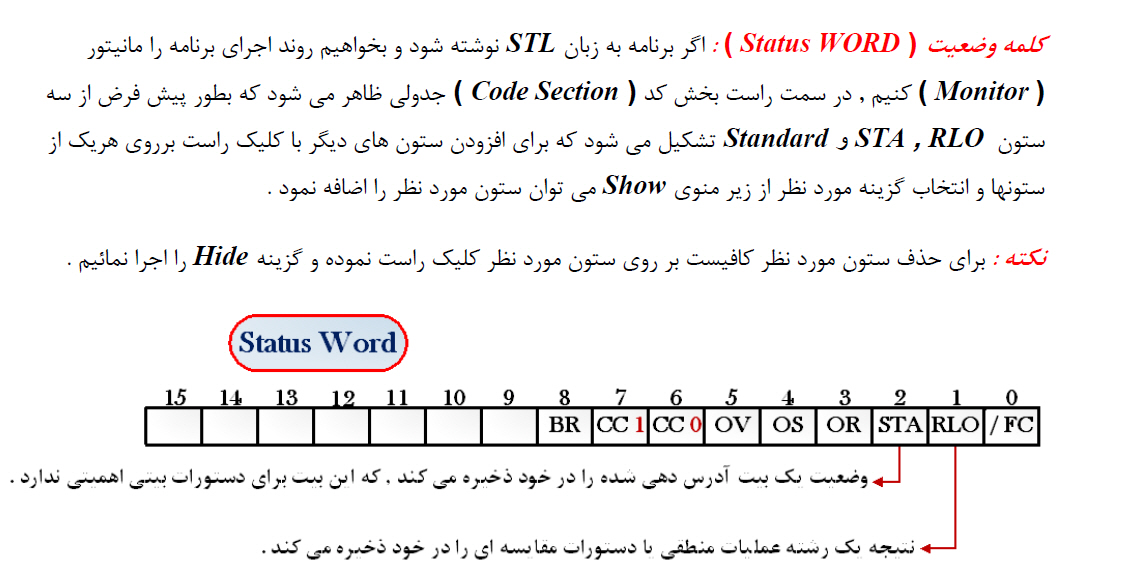
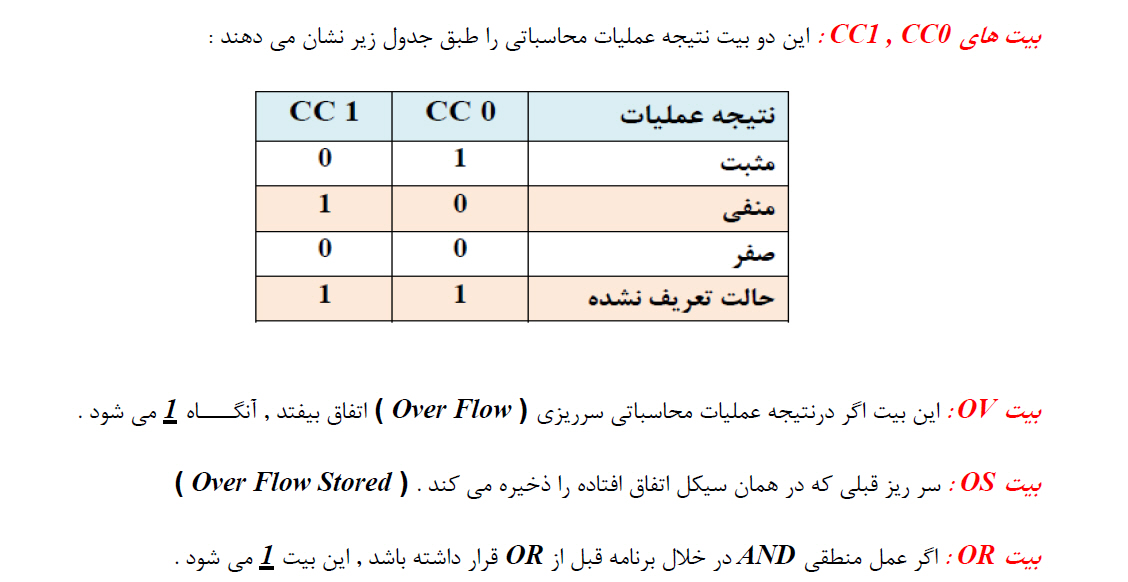
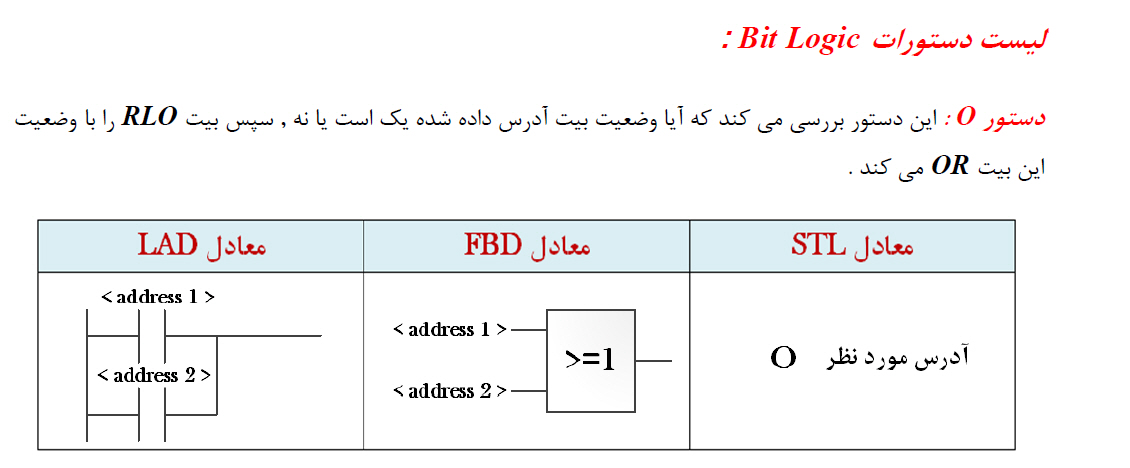
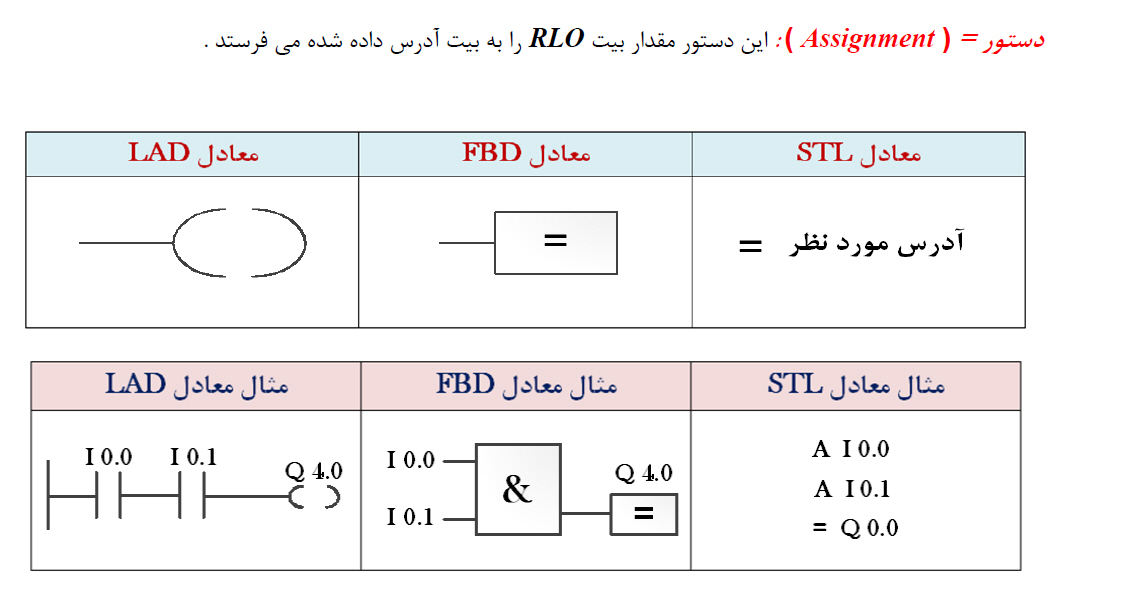
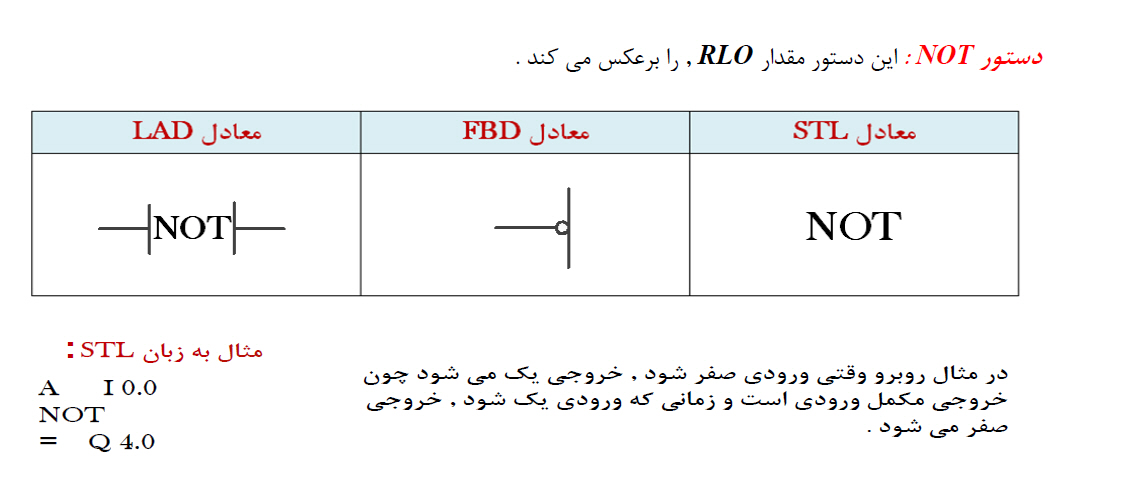
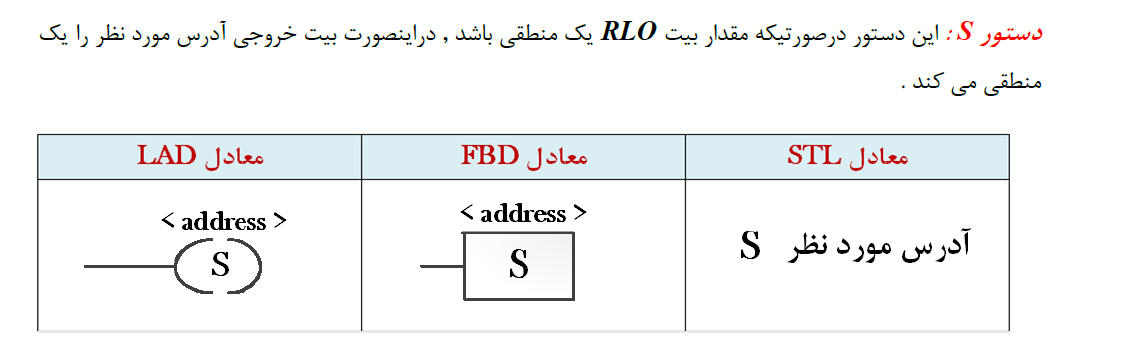
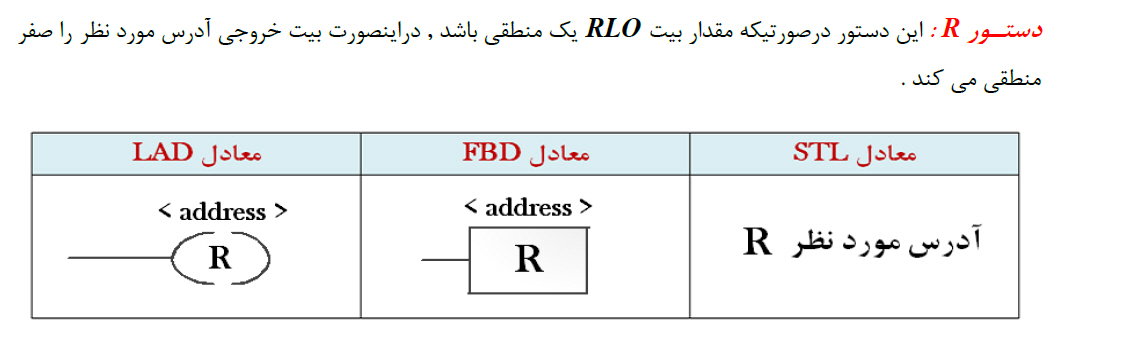
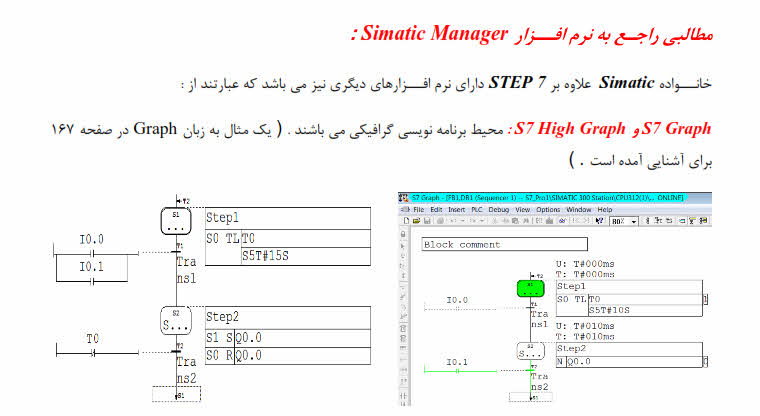
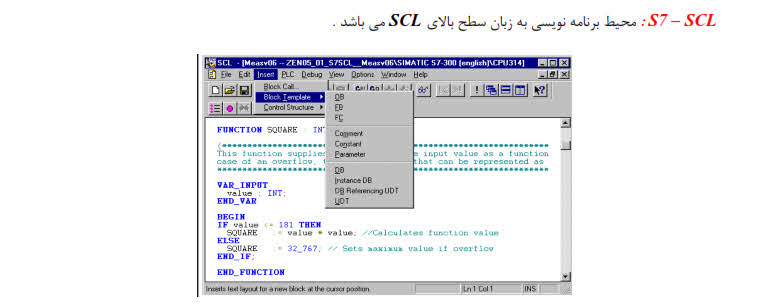
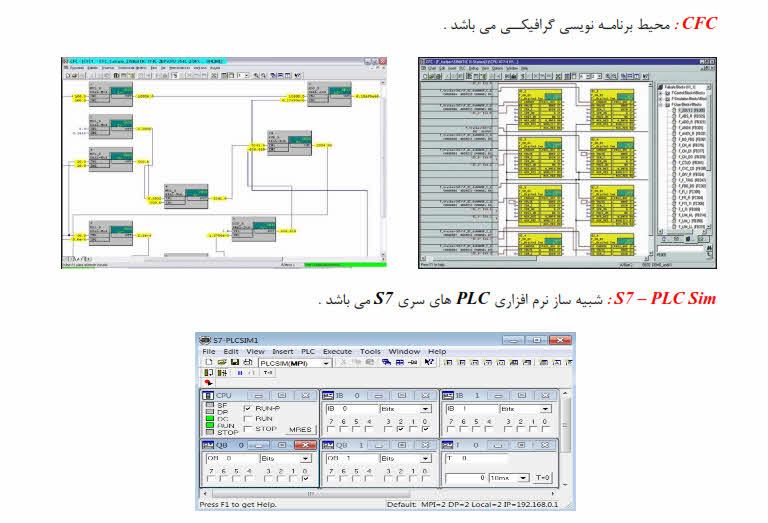
نرم افزار Simatic Manager و دستورات Bit Logic :



فیلم آموزشی کوتاه برنامه نویسی نرم افزار Simatic Manager و زبانهای برنامه نویسی LAD / FBD /STL :
طراحی مدارفرمان راه اندازی الکتروموتوربه صورت لحظهای و دائم کاربا نرم افزار Simatic Manager به زبان LAD به همراه فیلم آموزشی
توجه : در شکلهای زیر ، مدارهای راهاندازی الکتروموتور به صورت لحظهای و به صورت دائمکارنشان داده شده است ، که قبلاً درمورد آنها ، توضیح دادهایم ، و در فیلم آموزشی ، طراحی مدارهای فرمان مذکور را به زبان برنامهنویسی LAD در محیط نرم افزار Simatic Manager مشاهده میکنید ، اما در آینده خواهید دید که توسط فلیپ فلاپ SR ، به سادگی میتوان مدار راه اندازی الکتروموتور به صورت دائم کار را طراحی و برنامهنویسی کرد و فیلم آموزشی فقط برای مقایسه با مدارهای فرمان کنتاکتوری که ملاحظه میکنید ، میباشد .


فیلم آموزشی طراحی مدار فرمان راه اندازی الکتروموتور ، به صورت لحظهای و به صورت دائمکار در محیط نرم افزار Simatic Manager به زبان برنامهنویسی LADDER :
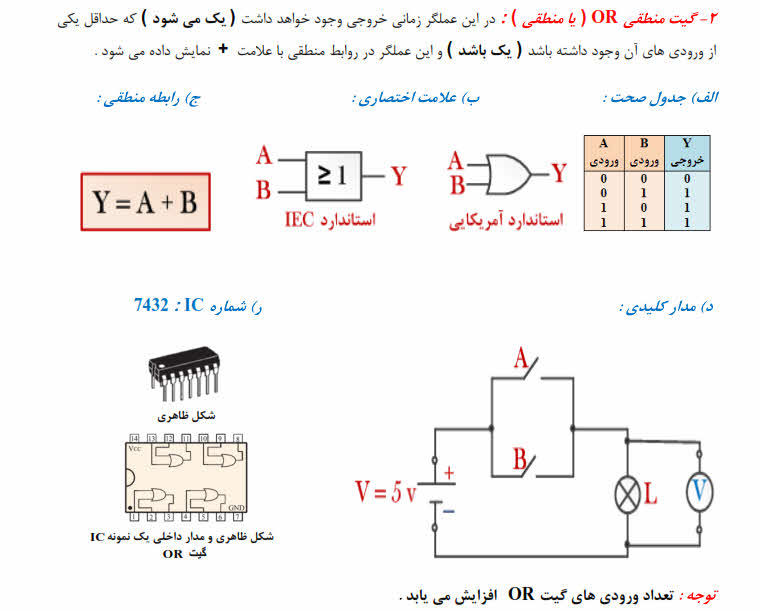
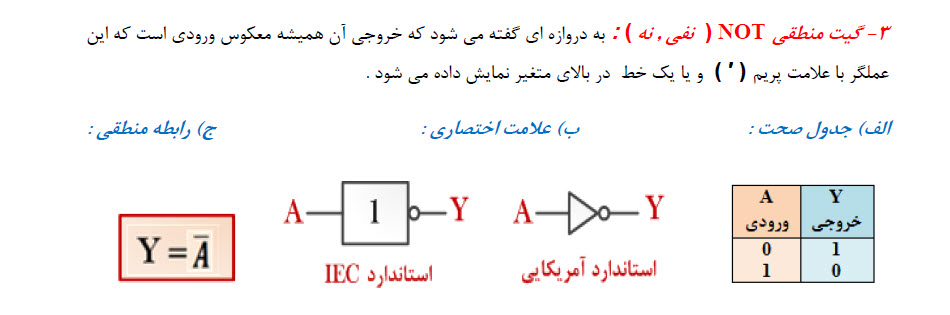
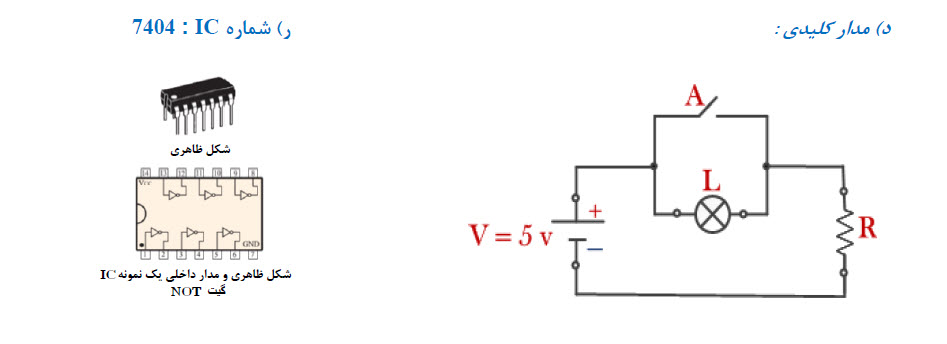
گیت های AND , OR , NOT در محیط نرم افزار Simatic Manager - فیلمهای آموزشی Simatic Manager - GATES AND , OR , NOT
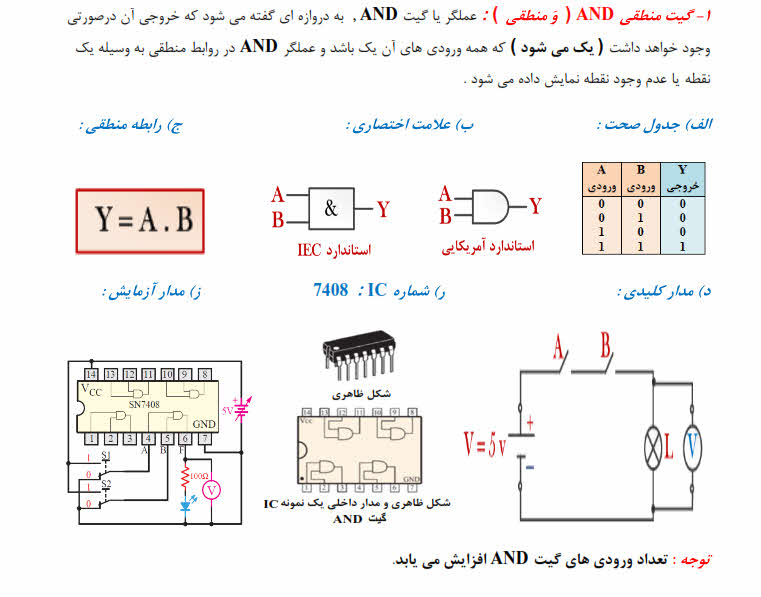
فیلم آموزشی گیت AND در محیط نرم افزار Simatic Manager :